Biography
I am currently working as a Data Scientist at Talan working as a consultant for the RATP Group. I was a former postdoctoral researcher in Automatic Control at UGE formely IFSTTAR. My recent research interests include Networked Control Systems (NCS), Cyberphysical Systems (CPS), Intelligent Transportation Systems (ITS) and Artificial Intelligence (AI). Previously, I did my PhD at INRIA/CNRS with the NeCS team developing Short-term Forecasting and estimation techniques for large scale traffic networks. During my last research experience, I worked at the LICIT team working on control techniques for connected and automated vehicles (CAV)s.
I am passioned about the Data Science community and the recent work developed around reproducible research. Fan of #rstats and python.
Please find a recent list of publications here Download my resumé.
- Artificial Intelligence
- Automatic Control
- Intelligent Transportation Systems
-
PhD Automatic Control, 2018
Université Grenoble Alpes
-
M.E. Electronic Engineering, 2012
Pontifical Xavierian University
-
B.E. Electronic Engineering, 2008
Pontifical Xavierian University
Skills
Manipulation, DataViz, Modeling
Predictive, Non-linear, Gurobi, CVX
Hardware in the Loop / Control toolbox
Hardware Oriented Development
PyViz, Pandas, Keras
Tidyverse
Experience
Responsabilities include:
- Development of new data analysis technologies for predictive maintenance for the RATP Group
- Data science model and implementation of new features for SERVAL 2. Maintenance application for the metro/train system at RATP.
Responsabilities include:
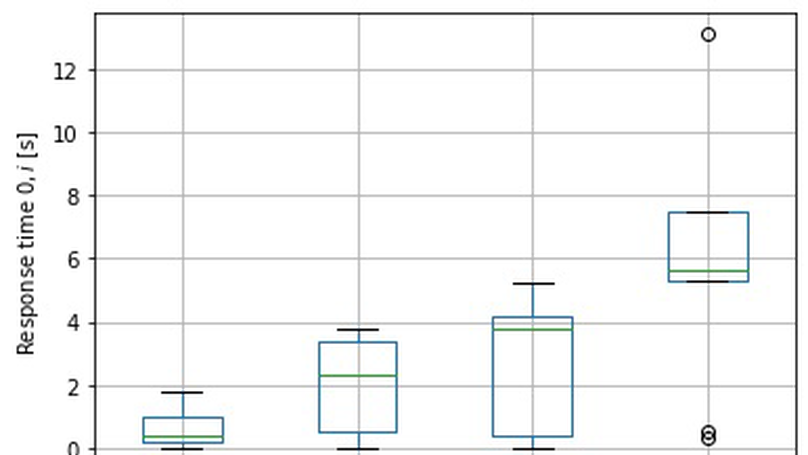
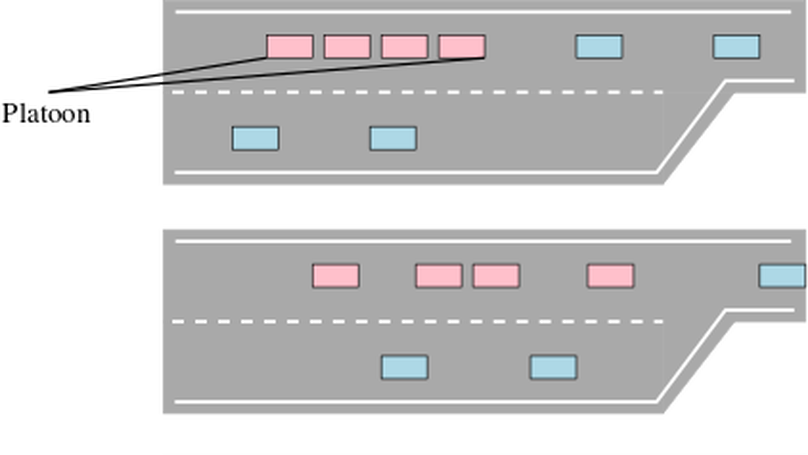
- Lead a ENSEMBLE team working on assessment for traffic impact of automated vehicle technologies
- Implemented (Python, C++) platooning software architectures and interfaces for traffic simulators;
- Analysed ADAS protocols to ensure platooning communication at simulation level;
- Core participant in the long program on Autonomous Vehicles IPAM UCLA
Responsabilities include:
- Visitor Researcher UCLA;
- Designed statistical learning algorithms to estimate and predict travel time in traffic networks.
Development of estimation and prediction techniques for traffic systems:
- Developed and deployed the GTL website (Traffic Use Case for the SPEEDD project);
- Developed real time forecasting algorithms for traffic networks;
- Developed algorithms to reconstruct and estimate missing data.
Responsabilities include:
- Developed the communication programs for the EU funding ADDE SALEM;
- Instructed courses for 3rd year students in: Automatic Control and Dynamical Systems.
Responsibilities include:
- Analyzed and adapted Business Process Management (BPM) practices IT for SO contracts;
- Coordinated and deployed Operational Service Manuals (OSM) jointly with IT management for 3 main clients.
Accomplishments
Recent Posts




Projects




Featured Publications
Recent Publications




Contact
- andres.ladino@vivaldi.net
- +33 4 72 14 25 49
- 25, avenue François Mitterrand, Bron, ARA 94305
- Enter Main Building take the stairs to Office 408 on Floor 4
- Monday-Friday 9:00 to 17:00
- Book an appointment
- DM Me
- Skype Me
- Let’s chat